Vorüberlegung
Eigentlich würde ich gern die Loks in Müsum digital steuern. Ergeben sich doch durch die eingebaute Lastregelung bessere Fahreigenschaften. Durch die erst vor kurzem erschienenen Minidecoder spielt Platz in den Fahrzeugen kaum keine Rolle mehr. Doch andere Faktoren sind schon relevant.
Die Fahrtrichtung digitaler Fahrzeuge wird nicht von der Gleisspannung bestimmt. Dafür ist der Decoder zuständig. Für einen Richtungswechsel reicht ein einfaches Umpolen der Gleisspannung nicht. Das erledigt die Zentrale. Da ich nur mit Lokmaus und Gleisbox fahre, benötige ich diverse elektronische Komponenten für die Steuerung der Anlage:
- Rückmeldung
- Neue Zentrale oder PC-Interface
- Laptop
- Steuerprogramm
Diesen Aufwand möchte ich nicht treiben, um einen einzigen Zug hin und her fahren zu können. Ich baue den Decoder nicht in das Fahrzeug ein, sondern benutze ihn als Fahrregler.

Ein bisschen Theorie
Beim Umrüsten meiner BR 216 habe ich festgestellt, dass der eingebaute Decoder das Fahrverhalten bei Glockenankermotoren erst einmal verschlechtert. Erst im Zusammenhang mit Kondensatoren als Energiespeicher erreicht man wieder das ursprüngliche Fahrverhalten.
Dieses Problem wird durch den „verlöteten Decoder“ verhindert. Hier ist ein Pufferspeicher unnötig, denn es gibt keine Stromunterbrechung. Die habe ich allerdings zwischen Decoder und Motor am Gleis. Hier spielt die Lastregelung ihren Vorteil aus. Die Spannung wird augenblicklich hoch geregelt, bis der der Motor seine Solldrehzahl erreicht hat.
Das Umschalten der Fahrtrichtung ist hierbei unproblematisch. Da am Gleis Gleichstrom anliegt, reicht es ihn über ein Relais umzupolen. Eine einfache Zeitschaltung schaltet das Relais.
Der vorhandene Regler besteht aus einem Halbwellen-Fahrregler und einer einfachen Zeit gesteuerten Pendelzugsteuerung. Sie wird über die Betriebsspannung zugeschaltet.
Von der Idee, einen neuen Regler zu bauen, bin ich abgekommen. Der Decoder kann in das vorhandene Gerät eingebaut werden. Mit einem Schalter könnte man sogar zwischen Halbwelle und Decoder wählen. Auf die direkten Fahrvergleiche freue ich mich jetzt schon.
Bestandsaufnahme
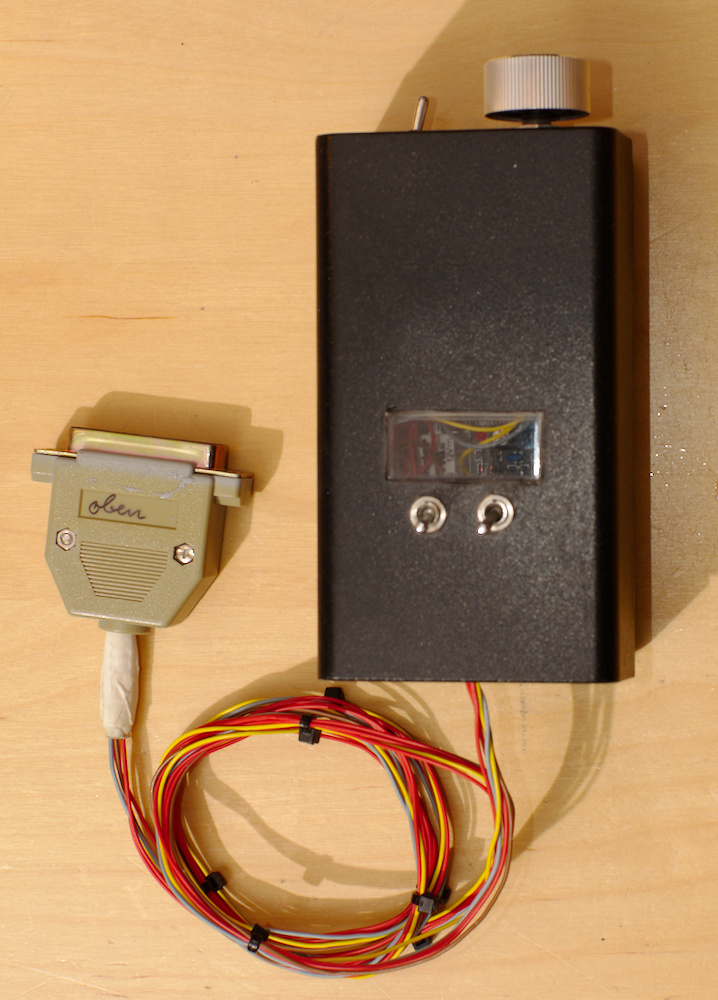
Der Fahrregler stammt noch aus seligen KWE-Zeiten. Hinter dem Plexiglas war mal ein Voltmeter, das aber seinen Geist aufgegeben hat. Oben ist der Fahrtrichtungsumschalter und der Geschwindigkeitsregler des Halbwellenfahrgeräts zu sehen. Die beiden Schalter unten schalten die Automatik und das Brückengleis zu.
Planung
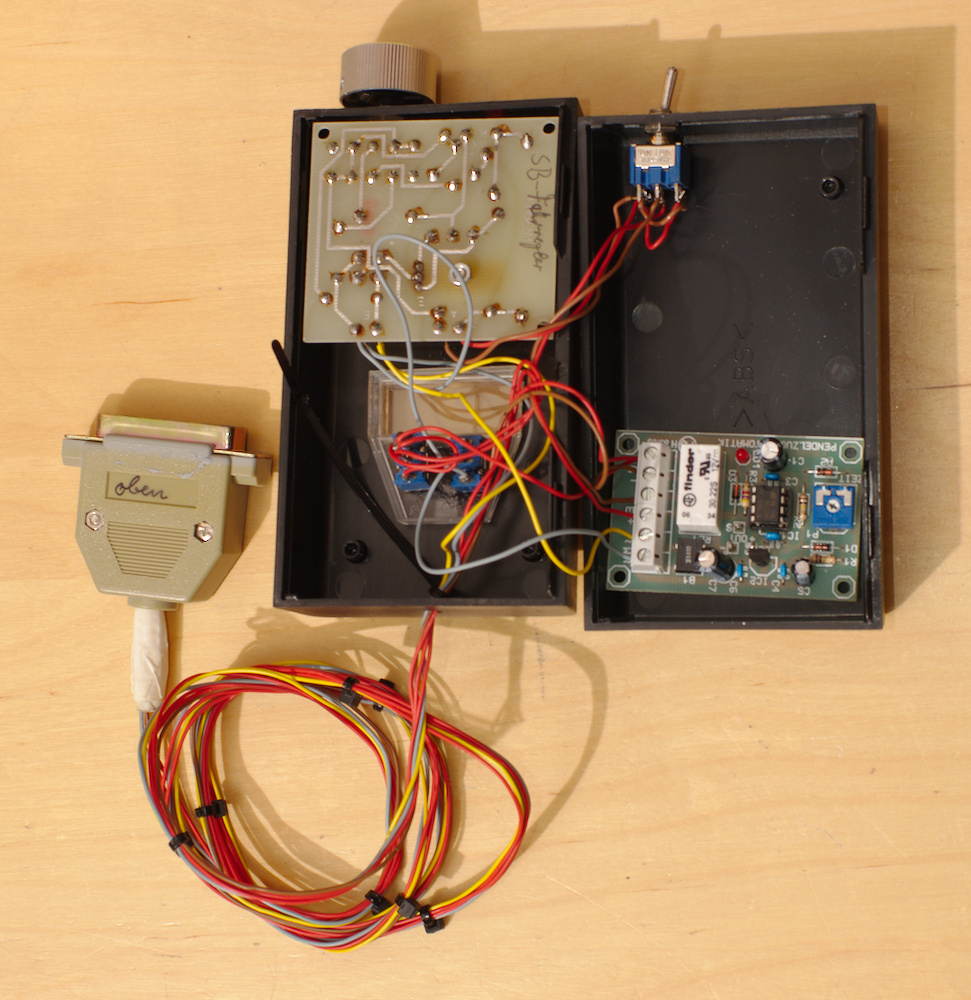
Der unübersichtliche Drahtverhau innerhalb des Reglers war bei den wenigen Bauteilen durchaus zu tolerieren, doch nun kommt einiges dazu. Hier werde ich eine kleine Streifenraster-Platine bauen, um Übersichtlichkeit zu erreichen.
Die Umschaltung zwischen Halbwelle und Digitaldecoder werde ich unter die Reste des Voltmeters platzieren. Drei Dioden im „Glas“ werden die Betriebszustände anzeigen.
- Halbwelle ein
- Automatik ein
- Digital ein
Da ich wissen möchte, wie groß die Streifenraster-Platine werden muss, zeichne ich einen Schaltplan.
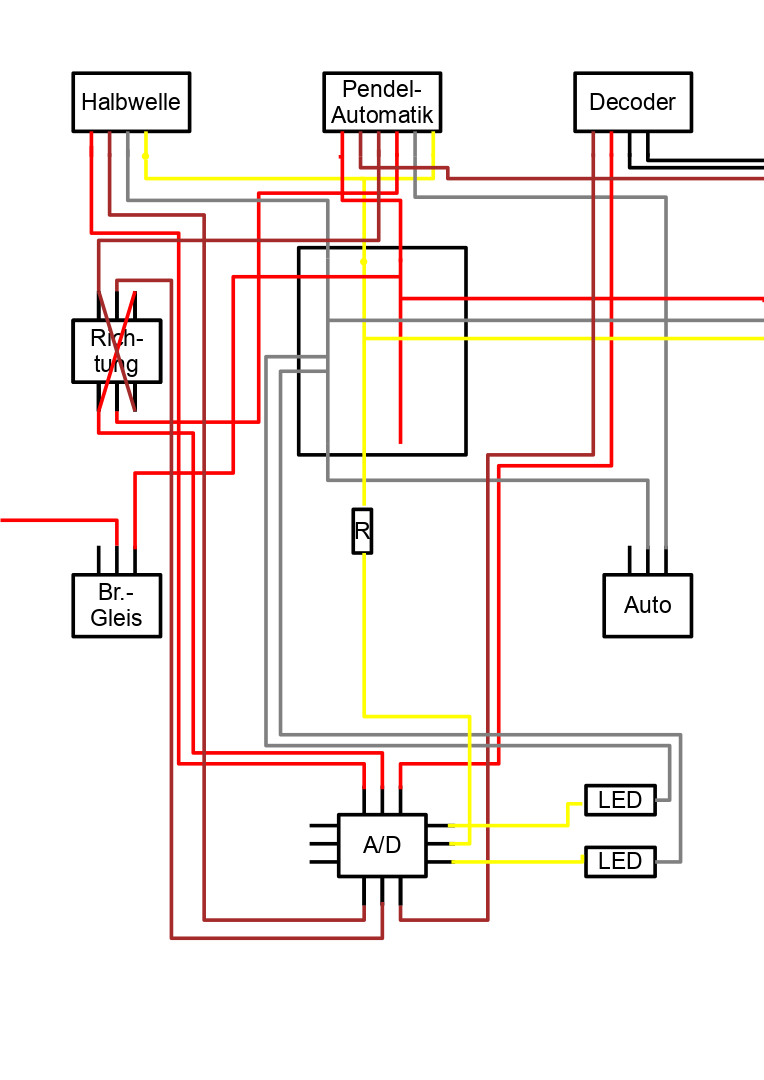
Der Schaltplan sieht kompliziert aus, fast alles ist aber schon verdrahtet. Lediglich muss ich ein paar Kabel an die Platine löten und drei Leuchtdioden, einen Schalter und den Decoder integrieren.
Das Statusdisplay
In meinen Schätzen finde ich genau drei fertig konfektionierte Leuchtdioden. Sie besitzen schon ein Gehäuse und Vorwiderstände. Sie werde ich benutzen.

Zuerst nehme ich die Innenmaße des Displays und zeichne am PC ein Beschriftungsschild. Sie drucke ich mehrfach aus und benutze ein Exemplar als Bohrschablone für die LEDs.
Aufräumaktion
Der Umschalter ist ein richtiger Brocken. Er passt aber noch unten mittig in das Gehäuse.
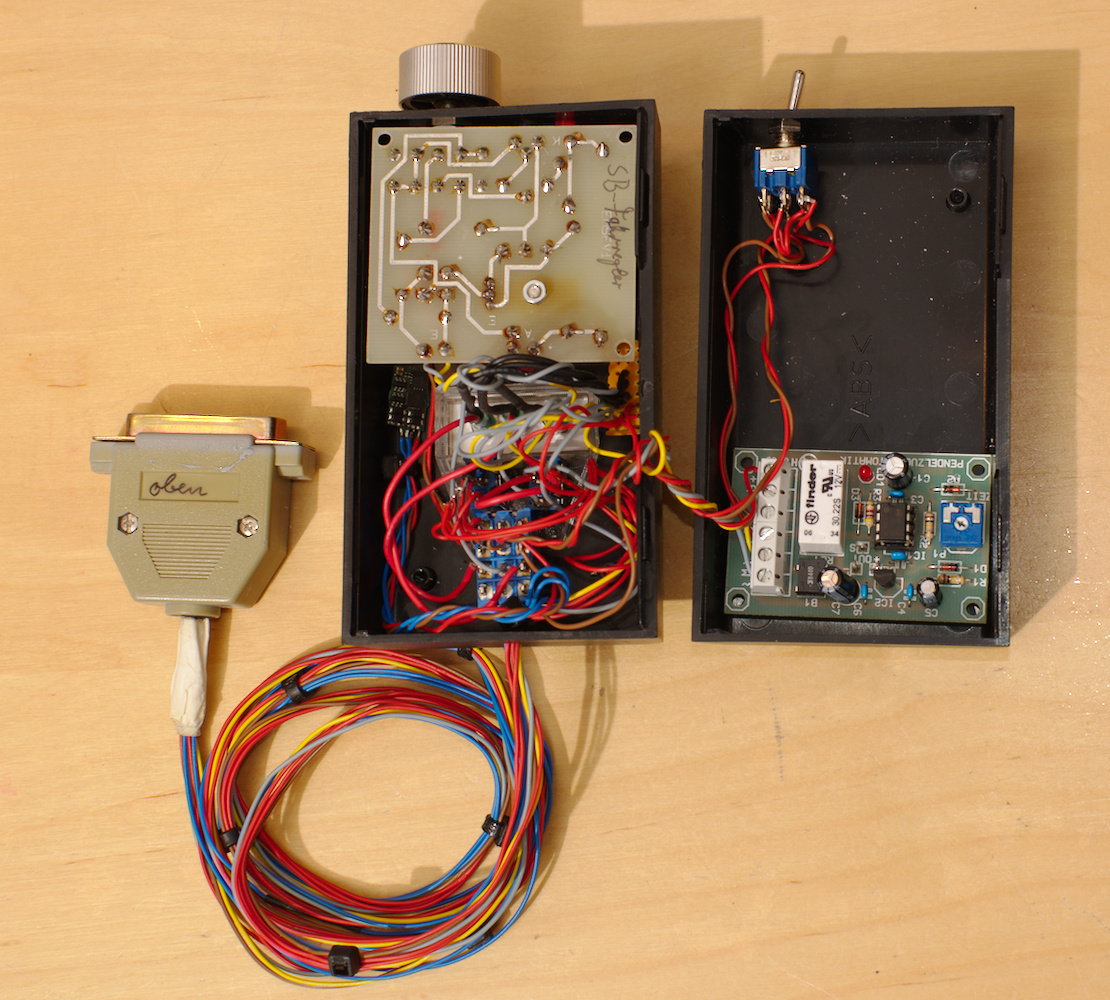
Dann wird gebohrt, geschraubt, gelötet, verlängert, verkürzt und verdrillt. Nach drei Stunden bin ich endlich fertig.

Probefahrt
Um den Testkreis benutzen zu können, löte ich noch schnell einen Adapterstecker und schließe den Testkreis, Digitalsteuerung und 10V-Wechselstrom an.

Die Probefahrt zeigt erst einmal im für Müsum relevanten Bereich etwa gleiche Fahreigenschaften. Eine wirklich sichtbare Verbesserung ist nicht vorhanden. Ein Vorteil ergibt sich, wenn das Fahrzeug stehen bleibt und der Decoder keine Rückmeldung erhält. Dann wird beim erneuten Anfahren die Geschwindigkeit erst einmal erhöht. Nach ein bis zwei Sekunden pendelt sie sich wieder ein.
In Müsum musste man eine leicht erhöhte Mindestgeschwindigkeit einstellen, damit die Fahrzeuge beim Pendeln zuverlässig anfuhren. Hier sollte es mehr Zuverlässigkeit geben.
Programmierung
Zuerst wurde die Motorfrequenz auf 32kHz erhöht. So erscheinen die Betriebsgeräusche „weicher“ und die Belastung des Motors verringert.
In Fahrstufe 1 bleibt der Triebwagen stehen. Erst bei Fahrstufe 2 schleicht er kaum wahrnehmbar über die den Testkreis. Deshalb wurde die Mindestgeschwindigkeit erhöht. Am Gleis liegen nun mindestens 0,5V an.
Die Höchstgeschwindigkeit wurde soweit erhöht, dass am Gleis 10V anliegen. Die Erfahrungen beim Messebetrieb zeigen, dass trotz größt möglicher Gleisreinigung, die ersten fünf Minuten mit hoher Geschwindigkeit gefahren werden muss, bis ein zuverlässiger Pendelbetrieb möglich ist.
Auf andere Einstellung wie Kennlinien, Rangiergang, Anfahr- und Bremsverhalten habe ich verzichtet, da in Müsum nur mit einer fest eingestellten Geschwindigkeit gefahren wird.
Auf der Anlage
Auf der Strecke zieht der Zug stoisch und schön langsam seines Weges. Die Geschwindigkeit ist sehr konstant. Was ich auf dem Testkreis als Vorteil angesehen habe, erweist sich auf der Anlage als Nachteil. Das Losfahren wird zum Kavalierstart. Auf der nächsten Ausstellung werde ich mal intensive Probefahrten machen. Damit es nicht zu lang wird, habe ich mal ein Video gemacht.